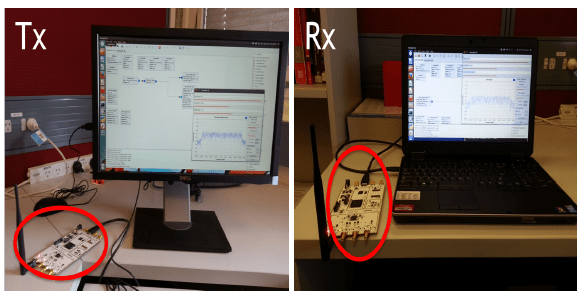
Wireless communication is energy inefficient due to the nature of the medium that spreads out energy in an unguided manner, as opposed to guided media like optical fiber and coaxial cable. To avoid wastage of power, one solution is to lower the transmit (Tx) power but then the receiver is left with the herculean task of efficiently demodulating the receive symbols at a low SNR. This article describes the design and implementation of one such receiver. Background The physical layer of a receiver system consists of three major parts, namely the frontend, the inner receiver, and the outer receiver. The
Continue reading