In a previous article, we described how multiples antennas can be viewed as sampling the signal in space domain in a direct analogy to sampling the signal in time domain. Filters in discrete-time domain are usually defined by numerical values in the time axis. Space allows three-dimensional freedom. A filter in discrete space can have its elements placed anywhere in the space. This sounds very complicated! But we will show it is not. A Simple Time Domain Filter: 2-Tap FIR The simplest discrete FIR filter has only two samples of unit magnitude. Assuming unit magnitude and zero phase for both
Continue readingCategory: DSP
Digital Signal Processing
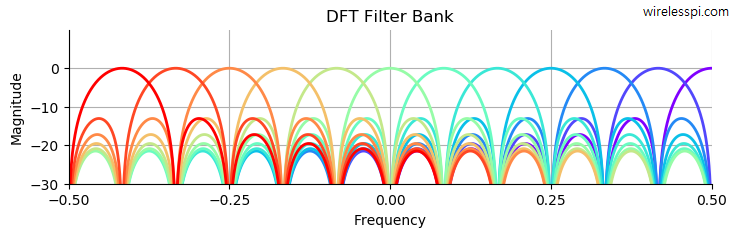
Discrete Fourier Transform (DFT) as a Filter Bank
We have discussed before what a Discrete Fourier Transform (DFT) is and how to find the DFT of some commonly used signals. Here, we will see how a DFT acts as a (crude) bank of filters that can pass the signal contents around a desired frequency while blocking the rest. Let us start with the definition of the DFT. \begin{equation*} \begin{aligned} S_I[k]\: &= \sum \limits _{n=0} ^{N-1}\left[ s_I[n] \cos 2\pi\frac{k}{N}n + s_Q[n] \sin 2\pi\frac{k}{N}n\right] \\ S_Q[k] &= \sum \limits _{n=0} ^{N-1}\left[ s_Q[n] \cos 2\pi\frac{ k}{N}n – s_I[n] \sin 2\pi\frac{k}{N}n\right] \end{aligned} \end{equation*} for each $k$. In complex notation, this DFT is
Continue reading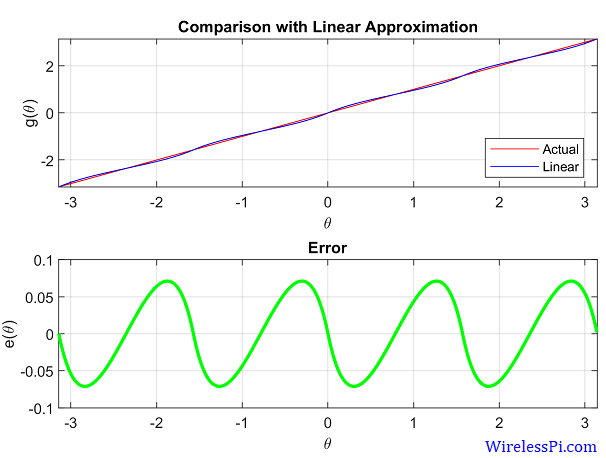
3 Ways to Approximate atan2( ) in Hardware
When we think about signal processing, the focus is usually magnitude response of a system. However, in several DSP applications, the signal phase holds as much, if not more, significance as the magnitude response. For example, in digital FM demodulation, carrier phase synchronization and RF ranging, the phase (found through arctangent in four quadrants) of a complex signal needs to be computed by an FPGA or a DSP for further processing. In image processing applications, such an operation is also required to calculate the gradient orientations used in several popular feature descriptors like the Scale-Independent Feature Transform (SIFT) or the
Continue reading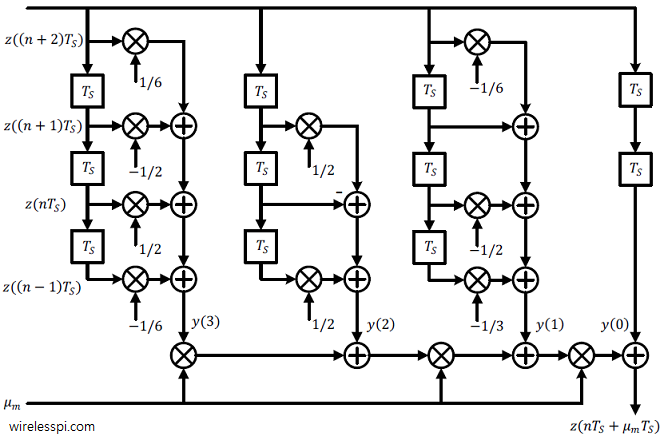
Fractional Delay Filters Using the Farrow Structure
In the discussion on piecewise polynomial interpolation, we emphasized on the fact that the fractional interval $\mu_m$ needs to be updated for each symbol time $mT_M$ and hence the subscript $m$ in $\mu_m$. For this reason, the interpolation process becomes a two-step procedure. Update the filter coefficients $h_p[n]$. Perform the convolution between $z(nT_S)$ and $h_p[n]$. This process can be simplified if the two steps above can be combined in such a way that $\mu_m$ update is weaved into the convolution operation. In other words, instead of a two-input hardware multiplication with two variable quantities, complexity can be reduced by restructuring
Continue reading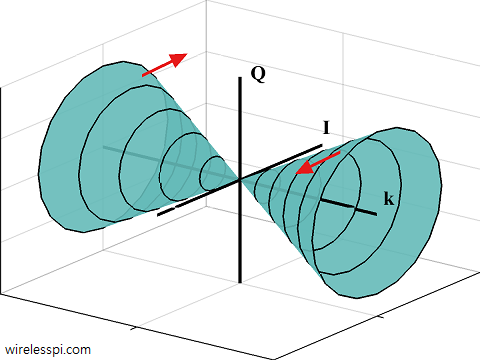
Effect of Time Shift in Frequency Domain
Children usually ask questions like “How many hours have passed?” And they have no idea about the start time to be taken as a reference. Just like the zero of a measuring tape, a zero reference for time plays a crucial role in analyzing the signal behaviour in time and frequency domains. Until now, we assumed that reference time $0$ coincides with the start of a sine and a cosine wave to understand the frequency domain. Later, we will deal with symbol timing synchronization problem in single-carrier systems and carrier frequency synchronization problem in multicarrier systems, both of which address
Continue reading