In every digital communication system, the Tx has the easier role of signal generation while the Rx has the tougher job of figuring out the intended message. Just like solving a puzzle told by someone. Estimating and compensating for the frequency, phase and timing offsets between Tx and Rx oscillators is one such challenge. The solution can be designed depending on many factors such as some part of data is known (called a ‘training sequence’) or not, the synchronizer needs to be one-shot or continuously updating, and so on.
Known Data Availability
Depending on the availability of known data, synchronization theory in digital systems are largely based on the following three approaches.
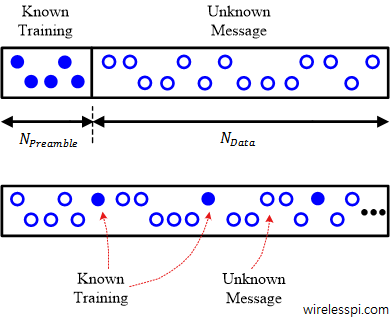
- Data-aided: To help the Rx in many systems, the Tx inserts symbols already agreed upon with the Rx within the message such that the Rx can acquire unknown parameters through knowledge of this `data’. This is shown in Figure below. Performing synchronization using this training is known as data-aided synchronization. Most widespread wireless communication systems in today’s world such as LTE and WiFi implement algorithms based upon this approach.

One problem with data-aided synchronization strategy is the waste of resources. The power and time spent on transmitting training sequence could have been used for sending more data: the spectral efficiency of the system is reduced by a non-negligible factor. Assuming a training length of $N_{\text{Train}}$ and message length of $N_{\text{Data}}$, the spectral efficiency decreases by a factor of
\begin{equation}\label{eqRealWorldSEReduction}
\frac{N_{{\text{Data}}}}{N_\text{Train}+N_{{\text{Data}}}}
\end{equation} - Decision-directed: To avoid this penalty, alternative techniques need to be adopted. Extending the above idea, once the Rx starts demodulating the signal and making decisions, it can use those decisions as known data in order to successfully track the changes in nuisance parameters, such as slowly changing carrier phase offset. This technique is known as decision-directed synchronization. It is evident that decision-directed approach can work well only when the detector decisions are correct such as in high SNR case. Otherwise, a wrong decision leads to a poor estimate, a poor estimate leads to a wrong decision in the next cycle, and the chain continues in the form of error propagation.
- Non-data-aided or Blind: In other situations, however, neither a preamble nor the decisions can be used. Here, some particular characteristics of the incoming signal can be employed to estimate the unknown parameters. This is known as non-data-aided or blind synchronization technique. Adopting a non-data-aided synchronization approach can retain the spectral efficiency but its convergence is slow because a large amount of data needs to be processed to average out the effects of noise and find a reliable estimate.

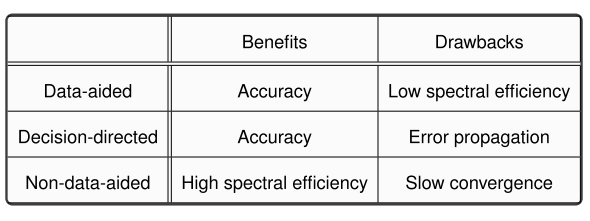
The benefits, drawbacks and conditions for these synchronization approaches are summarized in Table below.
Feedback or Feed-forward
Irrespective of the data knowledge, synchronization blocks can be implemented in one of the following two manners:
- Feed-Forward, Open Loop, or Batch Processing: There are many applications in data communications where the transmission occurs in a start and stop manner with periods of inactivity in between. This is known as burst mode communication. Here, the Tx forms a complete packet by inserting a sequence of known symbols — also called a preamble or a training sequence — before the actual message symbols as shown in the above Figure. In burst-mode, samples of the received signal are processed to establish a direct one-shot estimate of the target parameter through batch processing. Signal processing to establish the expression for the estimate is based on an algorithm derived from the mathematical structure of the Rx signal. Once this parameter is determined, it is corrected from the Rx signal without feedback to any previous block. In case of phase synchronization for example, the phase estimate can be used to de-rotate all data in that burst.
- Feedback, Closed Loop or Recursive: Many other communication links work in continuous mode where the signal is transmitted either at all times or for a long duration. Here, fast acquisition is not as important and the objective is to lock onto the target parameter within a reasonable time after the arrival of the received signal. So an estimate of the error signal (for example $e_{\theta}= \theta_{\Delta} – \hat \theta_{\Delta}$) is derived which forms the basis of a corrective signal that is fed back to a compensation unit. A Phase Locked Loop (PLL) can be employed for this purpose with some modifications discussed later. Feedback acquisition can work blindly, in a decision-directed manner or can also take help from training inserted periodically within the message as shown in Figure above. This category of processing has an inherent ability to automatically track slowly varying parameter changes.
In summary, there are $3 \times 2=6$ possible ways to implement a synchronizer depending on the knowledge of data and the loop being closed or open. Different algorithms can be designed for many of these topologies but not all, examples of which we will see in many other articles.