
In his book Multirate Signal Processing, Fred Harris mentions a great problem solving technique:
"When faced with an unsolvable problem, change it into one you can solve, and solve that one instead."
We will see in this article how an FMCW radar is one of the most beautiful applications of this approach.
- The apparently logical method to measure the range of an object is through estimating the time delay of a reflected wave (on the order of a few nanoseconds) that is both expensive and less accurate. We can associate the range with the frequency of a sinusoid and measure that instead. This proves to be much simpler and accurate.
- There is another surprising way to apply this idea here that can only be understood after delving into the details. Therefore, it is mentioned in the concluding section.
Background
Radar (Radio Detection and Ranging) is an extension of human sensory perception. To understand this idea, consider the following two points.
- Imagine a bat in a dark night or inside a cave. It utilizes a remarkable method called echolocation to navigate and locate its prey. This involves emitting higher frequency ultrasound waves through their mouth or nose (the transmitter) that bounce off various objects which are then detected by its finely tuned ears (the receivers). This enables the bat to detect an insect prey as small as a mosquito!
- In principle, anyone can do the same to detect an object through sound signals but our ears and brain have a significantly coarser resolution (besides, who wants to spend all the time howling). Looking elsewhere (no pun intended), while vision is the most powerful sensor nature has given to us, our eyes can only act as passive radars and make use of the light signals already present in the environment.
What we can practically do is design a machine that utilizes the same principle but in the electromagnetic spectrum outside the visible range (RF, for example). This machine is a radar that never complains about transmitting high-energy waves all day long and processing the received signals as they return.

We will discuss one particular kind of radar, Frequency Modulated Continuous-Wave (FMCW) radar, in this series. It is particularly useful in short range applications such as object detection in self-driving cars for collision avoidance, heartbeat monitoring, vibration measurement in residential and industrial products, drones ranging and intrusion detection. It is interesting to note that FMCW radar waveform bears similarities to Long Range (LoRa) physical layer.
Since FMCW radars are widely used in automotive applications, we take the example of autonomous vehicles for explaining the idea.

Next, we describe the radar principle through a formal approach.
The Radar Principle
A radar emits electromagnetic energy in one or more directions and searches for reflections from an object in the returning signal.

We describe the information extraction process in terms of both real and complex signals.
Range
Assume that the Tx signal is a sinusoidal Continuous-Wave (CW) given by
\[
x(t) = A \cos (2\pi ft)
\]
where $A$ is the amplitude and $f$ is the frequency. If all this energy disappears into an empty sky, there is no return signal. However, if there is an object within the illuminated area, a building wall for example, then the return signal is
\[
y(t) = A_r \cos \big[2\pi f(t-\tau_0)\big] = A_r \cos \big[2\pi ft + \phi\big]
\]
Here, $A_r$ is the amplitude of the (now very weak) echo signal and $\tau_0$ is the delay incurred during the return trip between the radar and the target. This parameter contains all the information about the target range $d_0$ in its phase, since we can write from the above expression:
\begin{equation}\label{equation-fmcw-delay}
\phi = -2\pi f\tau_0, \qquad \text{or} \qquad \tau_0 = -\frac{\phi}{2\pi f}
\end{equation}
From the above figure, $d_0$ is the distance between the Tx and the Rx which is doubled due to the wave traveling back and forth in its journey. From Newton’s laws of physics, the time delay $\tau_0$ is then equal to $2d_0/c$ if $c$ is the speed of the electromagnetic wave.
\[
\phi = -2\pi f \frac{2d_0}{c} = -4\pi \frac{d_0}{\lambda}
\]
where $\lambda$ is the operating wavelength of the radar. From here, the distance is estimated as
d_0 = \frac{\lambda}{4\pi}\phi
\end{equation}
The negative sign has been removed because it arose from a delay and is immaterial with respect to the distance. As we shortly see, this technique is not useful for ranging since the sinusoidal wave is periodic with period $2\pi$. Therefore, the phase $\phi$ is unambiguous only within the range $-\pi$ to $+\pi$. For practical radio frequencies, this turns out to be only a few cm at most.
Next, we turn towards how to determine the velocity.
Velocity
Introduced in high-school physics as a frequency change in moving objects, the Doppler shift was explained in detail during the discussion on small-scale fading in wireless channels.
Imagine that the car in the above figure is driven at a constant velocity of $v$ m/s in the opposite direction. For all further times $t$, the electromagnetic wave that had to travel $d_0$ m now has to cover a distance of $d_0 + v t$.
\[
y(t) = A_r\cos \left[2\pi f \left(t-\frac{2d_0+ 2v t}{c}\right)\right] = A_r\cos \left[2\pi f \left\{\left(1- \frac{2v}{c}\right)t~ – \frac{2d_0}{c}\right\}\right]
\]
Clearly, the initial range is still the same as Eq (\ref{equation-fmcw-range}) while the Doppler shift $f_d$ is the change in frequency given by
f_d = \frac{2v}{c}f = \frac{2v}{\lambda}
\end{equation}
This yields the velocity as
v = \frac{f_d}{2}\lambda
\end{equation}
The wave arriving at angle of $\psi$ would have the Doppler shift scaled by $\cos \psi$. Since it is only the speed and not the range that can be determined, CW radars are mainly used in motion and speed sensing applications.
Receiver Block Diagram
The derivation for range above is quite simplistic. An actual CW radar sends an unmodulated wave and removes the carrier on the return path for extracting the desired signal, a block diagram for which is drawn in the figure below. The multiplier shown in Rx chain is known as a mixer and its output is of main concern to a radar designer.

If you are a DSP beginner, think of the mathematical expressions in the following terms. What happens when two sinusoids are multiplied with each other? The result is two sinusoids, one at a difference frequency and the other at summation frequency.
\[
2\cos\left[2\pi f (t-\tau_0)+\theta\right]\cdot \cos\left[2\pi f t+\theta\right] = \cos \left[ -2\pi f\tau_0\right] + \underbrace{\cos \left[2\pi \cdot 2f t -2\pi f \tau_0 +2\theta\right]}_{\text{Filtered out}}
\]
The summation frequency is lowpass filtered to yield the difference frequency term only. Next, we describe how to derive the same result through complex signals.
CW, Complex Sinusoid and IQ Processing
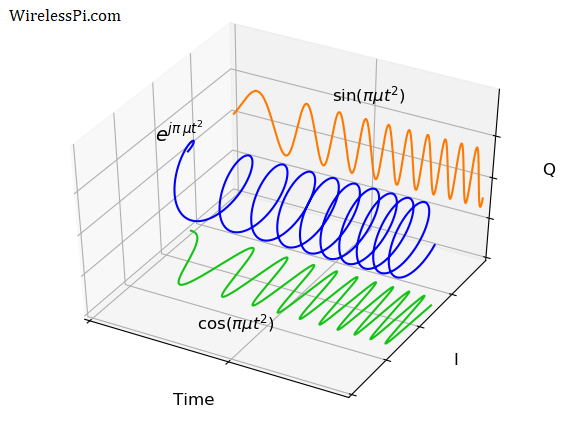
In practice, IQ signals are used whenever the phase is involved in a detection or estimation procedure. A Continuous Wave (CW) in IQ form is known as a complex sinusoid that is drawn in the figure below.

The expression for a complex sinusoid is given by $e^{j2\pi f t}$ where the instantaneous phase is a linear function of time.
\[
\phi = 2\pi ft
\]
The figure also demonstrates the Euler’s relation
\[
e^{j2\pi f t} = \cos (2\pi f t) + j\sin (2\pi f t)
\]
The real part $\cos (2\pi f t)$ can be seen as the projection of this complex sinusoid on the real plane (formed by time and $I$ axes). Moreover, the imaginary part $\sin (2\pi f t)$ can be seen as the projection of this complex sinusoid on the imaginary plane (formed by time and $Q$ axes).
For an in-depth understanding of complex signals and I/Q processing, you can read the following articles (the option of downloading them as PDF is available).
We can now revisit the results for complex signals. In terms of complex signals, let the Tx signal be $e^{j(2\pi f t+\theta)}$ where we have included the phase $\theta$ ignored before. The received signal is its delayed version written as $e^{j[2\pi f (t-\tau_0)+\theta]}$. After a complex mixing process, we have
\[
y(t) = e^{j[2\pi f (t-\tau_0)+\theta]}\cdot e^{-j(2\pi f t+\theta)} = e^{-j2\pi f \tau_0}
\]
which has the same argument as the difference frequency above. Now let us explore why an unmodulated CW radar is not a very good idea.
Drawbacks of Unmodulated CW
In an ideal world, this simple CW gives us all the information we want. In practice, however, there are problems with this approach which limit the applications of CW radars.
- A CW radar cannot measure the range of a target. As described before, an unmodulated CW receives a phase $\phi$ that is unambiguous only within the range $-\pi$ to $+\pi$ because the mixer output is periodic with period $2\pi$. With no time or frequency markings, there is no way to differentiate between a, say, 100th cycle and 105th.
- The return signal amplitude $A_r$ is orders of magnitudes smaller than the Tx signal amplitude $A$. It is almost drowned by the Tx signal during the mixing and analog-to-digital conversion processes shown in the block diagram above. Separation between them needs to be achieved either through careful design to minimize leakage (monostatic) or physically separate antennas (bistatic).
- It is more difficult to combat the additive noise with a simple CW. In-band noise cannot be filtered out and adversely affects the estimation of phase and frequency. In fact, frequency estimation algorithms suffer from an SNR threshold effect: Below a certain SNR, the mean square error rapidly increases.
- In a multipath environment, the sum of multiple copies of such a signal exhibits the same frequency but a rotated phase given by their phasor addition. A modulated CW, as we will see later, can handle multiple reflections in a better way.
- It is very difficult to distinguish multiple targets around the radar since the returning waveforms from different objects overlap with each other with an effect similar to a multipath environment that distorts the phase and results in a loss of ranging information.
- The spectrum of a CW is a single narrow impulse. Therefore, it is more susceptible to interference from other transmissions.
As a consequence, we want an alternative technique and this is where modulation comes into the picture.
Pulse Compression
Let us explore what happens when a CW is modulated in time or frequency. The modulation acts as a marker against which the range can be determined, as we shortly see below. Moreover, the modulated signal bandwidth is no longer a single impulse. This expansion in frequency gives rise to a narrow signal in time domain which is advantageous for the radar. Think of an overlap among multiple return signals. Echoes of such a narrow time domain signal can be clearly distinguished at the receiver.
Nevertheless, there are several practical obstacles from an RF circuit design perspective in generation and processing of a high-power short duration signal. The question is then how a short time duration can be achieved with minimal implementation complexity.
The solution is that signal itself does not necessarily have to be of short duration. Recall that any return signals are processed by a filter in the receiver. Since convolution in the filter is quite similar to the correlation process, the filter or correlation output should produce a narrow time domain spike, even if the signal itself is not compact in time!
This idea gives rise to something known as a processing gain. Processing gain can be understood best by a Direct Sequence Spread Spectrum (DSSS) example. In this case, each data symbol is modulated with a spreading sequence that has a higher rate than the original data signal. This higher rate is known as processing gain or spreading factor due to now higher Time-Bandwidth Product (TBP). To recover the original data at the receiving end, the same sequence is employed and acts like a matched filter.
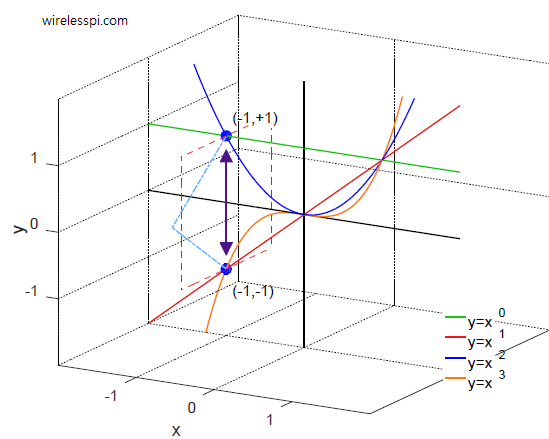
- Consider the box in the top subfigure below and notice how $-1$ in the echo and $-1$ in the matched filter are synced, as well as the remaining sequence. Therefore, a completely aligned copy of the same sequence at the receiver generates a much higher value during the point-by-point multiplication followed by a summation process (known as correlation). This is what acts as a marker for measurement purpose.
- Notice in the box shown in the bottom subfigure how $-1$ in the echo is multiplied with $+1$ in the matched filter and the output can be considered a random summation of $+1$s and $-1$s. Therefore, an unaligned sequence, even with the same values, generates a very small output as compared to the processing gain.

Common examples of DSSS systems include the Global Positioning System (GPS), IEEE 802.11b standard in WiFi networks and Code Division Multiple Access (CDMA) cellular systems.
Instead of a spreading sequence, an FMCW radar uses a chirp for a similar purpose, as shown in the figure below. A chirp is a signal with a linearly changing frequency. That is why this process is known as Linear Frequency Modulation (LFM).

Recall that a product of two sinusoids produces a difference and a sum frequency.
\[
2\cos\left(2\pi f_1 t\right)\cdot \cos\left(2\pi f_2 t\right) = \cos \left[ 2\pi (f_1-f_2)t\right] + \cos \left[2\pi (f_1+f_2) t\right]
\]
Summation over a long interval as performed in correlation thus produces low values for both terms above (since they have equal positive and negative halves), as shown in the bottom figure above.
On the other hand, a sinusoid multiplied with itself produces a DC gain in addition to a double frequency. Plugging $f_1=f_2=f$ in the above expression, we get
\[
2\cos^2(2\pi ft) = 1+\cos (2\pi \cdot 2f\cdot t)
\]
The sinusoid frequency is continuously changing in an FMCW wave. When correlated with itself in perfect alignment, similar frequencies line up together to generate a high peak, as shown in the top figure above. This is known as pulse compression that is achieved with the help of matched filtering.
Now let us find out how an FMCW waveform looks like.
FMCW Waveform
From a basic complex sinusoid that includes a linear instantaneous phase, we can move towards a basic chirp by extending it into a quadratic instantaneous phase, i.e., $e^{j\pi \mu t^2}$, where the reason behind the factor $\pi$ is explained soon. This signal is drawn in the figure below. Notice that instead of changing linearly over time, the phase is changing quadratically over time. This is why the signal seems to be compressed more and more to the right. Just like a frequency $f$ is the speed or rate of change of phase, a chirp rate $\mu$ is the acceleration of phase or rate of change of frequency.
From Euler’s relation, the real signal $\cos (\pi \mu t^2)$ can be seen as the projection of this complex sinusoid on the real plane (formed by time and $I$ axes). Moreover, the imaginary signal $\sin (\pi \mu t^2)$ can be seen as the projection of this complex sinusoid on the imaginary plane (formed by time and $Q$ axes).
It is common to draw this figure in 2 dimensions as shown below. The top subfigure is the same in-phase part of the complex chirp above for a chirp duration $T_C$.
- Here, it becomes clear why it can be seen as a CW modulated by a linearly changing frequency. The chirp spreads the spectrum and known as Chirp Spread Spectrum (CSS) in multiuser applications.
- Since the frequency is increasing, this waveform is known as an up-chirp. We will shortly see an example of a down-chirp too.

The spectrum of a chirp contains a wide band from the low initial frequencies to high final frequencies present in the signal. However, if you are familiar with FMCW radars, the bottom subfigure is what you would have seen before. To see where this comes from, let us write the general expression for the basic chirp, including the frequency and phase part.
\begin{equation}\label{equation-fcmw-basic-chirp}
x(t) = e^{j(\pi \mu t^2 + 2\pi f t+\theta)}
\end{equation}
The factor $\pi$ is actually $2\pi$ scaled by $1/2$. This is included to normalize the chirp rate taken as the slope of the instantaneous frequency (which is defined as the derivative of the argument).
\begin{equation}\label{equation-fmcw-nu1}
\nu(t)=\frac{1}{2\pi}\frac{d}{dt}\left(\pi \mu t^2 + 2\pi f t+\theta\right) = \mu t + f
\end{equation}
This is the relation drawn in the bottom subfigure above, where $f$ is the starting frequency (not the phase) shown as $0$ for simplicity (otherwise, the vertical axis should go from $f$ to $f+B$). Here, the chirp spans a bandwidth $B$ (called sweep bandwidth) over a time period $T_C$ (also known as sweep time). Hence, we can find the slope $\mu$ as
\begin{equation}\label{equation-fmcw-chirp-rate}
\mu = \frac{B}{T_C}
\end{equation}
The units of chirp rate $\mu$ should be Hz/second but it is common to measure it in terms of MHz/$\mu$s. In a typical transmission, several such chirps are transmitted in a sequence and the resultant FMCW waveform has a frequency vs time plot as shown below. Keep in mind that the actual IQ signal is still those spiraling chirps sent one after another.

For the sake of completeness, an up-chirp is not the only option an FMCW radar can utilize. A linearly decreasing frequency, known as a down-chirp is also possible, as drawn in the figure below. The actual signal and frequency vs time plot are shown on the left side.

In some situations, a combination of an up-chirp and a down-chirp proves more useful. This happens, e.g., when both static and moving objects need to be detected. Such a waveform, shown on the right side above, is called a triangular chirp.
We are now ready to see how an FMCW radar finds the range of a single target.
Range of a Single Target
An FMCW radar transmits a frequency modulated CW waveform in Eq (\ref{equation-fcmw-basic-chirp}). Assuming a single target at a distance of $d_0$ as before, the returning echo is a delayed version of the same signal. The delayed echo is drawn on the Tx time line in the figure below. Remembering that this is not the actual waveform, but a frequency vs time plot, a delay $\tau_0$ in the waveform also introduces a difference in frequency $f_b$, known as the beat frequency or Intermediate Frequency (IF). The expression beat frequency comes from the fact that it arises from the difference between the Tx and Rx chirps, as we shortly see in the DSP approach.

The range can be found by measuring the time delay $\tau_0$. However, the process of measuring small delays is much more complicated and inaccurate as compared to measuring the beat frequency through simple arithmetic operations.
There are three techniques to proceed from here.
Geometrical Approach
To find the relation between the time delay $\tau_0$ of the echo and the beat frequency $f_b$, consider the straight line in the above figure with slope $\mu$. Using the line equation $y=mx$, we can write
\[
f_b = \mu \tau_0
\]
Since $\tau_0=2d_0/c$ and $\mu=B/T_C$ from Eq (\ref{equation-fmcw-chirp-rate}), we have
\[
f_b = \mu \frac{2d_0}{c}, \qquad \text{or}\qquad d_0 = \frac{cT_C f_b}{2B}
\]
Another way is to notice that the little triangle formed by $\tau_0$ and $f_b$ in the above figure is similar to the big triangle formed by the sweep time $T_C$ and sweep bandwidth $B$. Using the property of similar triangles that the ratios of their sides are equal, we get
\[
\frac{\tau_0}{T_C} = \frac{f_b}{B}, \qquad \text{or} \qquad \tau_0 = T_C\frac{f_b}{B}
\]
which is also equal to $2d_0/c$. This translates into a two-way distance expressed as
\[
d_0 = \frac{cT_C f_b}{2B}
\]
Now we see how the same result can be achieved in an intuitive manner.
Intuitive Approach
Since each mathematical expression is telling us a story, a commonsensical way to find the distance is the following.
- The chirp rate $\mu$ is the rate of change of frequency, or change in frequency per unit time.
- The chirp takes time $\tau_0$ to travel back and forth between the FMCW radar and the target.
- During this interval, the frequency changes by
\[
\begin{aligned}
\text{Change in frequency} &= \frac{\text{Change in frequency}}{\text{Time}}\times \text{Time} \\
f_b &= \mu \tau_0
\end{aligned}
\]
The rest of the derivation for $d_0$ stays the same. Next, we explore this issue through a DSP approach.
DSP Approach
The other method is the same as done before in the case of CW. The delayed waveform can be written as
\[
r(t) = e^{j[\pi \mu (t-\tau_0)^2 + 2\pi f (t-\tau_0)+\theta]}
\]
To keep the expressions simple, we are ignoring the amplitude factors here. Signal processing in radar is performed in discrete time but we can find out the major expressions in continuous time. A complex mixing process with the same waveform then yields
\begin{equation}
\begin{aligned}
y(t) &= e^{j[\pi \mu (t-\tau_0)^2 + 2\pi f (t-\tau_0)+\theta]}\cdot e^{-j(\pi \mu t^2 + 2\pi f t+\theta)}\nonumber \\
&= e^{j(-\underbrace{2\pi \mu \tau_0 }_{2\pi f_b}t + \underbrace{\pi \mu \tau_0^2 – 2\pi f\tau_0}_{\phi})}
\end{aligned}
\end{equation}\label{equation-fmcw-chirp-mixing-output}
$$
The only term containing $t$ above is the first one which determines the frequency of the output waveform: the beat frequency. Since the negative sign is immaterial with respect to the distance,
\[
2\pi f_b = 2\pi \mu \tau_0, \qquad \text{or} \qquad f_b = \mu \tau_0
\]
This can be simplified as
\[
\tau_0 = \frac{f_b}{\mu}
\]
We deduce the following.
"The delay $\tau_0$ is given by the ratio of the changed parameter and the constant probing parameter."
This is a beautiful result that shows an underlying consistency in DSP that reveals exactly what is going on in the heart of a signal. Such insights stay hidden in other simpler approaches.
The rest of the details are the same. Since $\tau_0=2d_0/c$ and $\mu=B/T_C$, we have
\begin{equation}\label{equation-fmcw-single-target-range}
d_0 = \frac{cf_b}{2\mu} = \frac{cT_Cf_b}{2B}
\end{equation}
It turns out the same as derived through geometrical and intuitive approaches before.
In the expression for range $d_0$, all the parameters except the beat frequency $f_b$ are known because $c$ is the speed of the electromagnetic wave while $T_C$ and $B$ are system design parameters. Before we delve into that, however, we mention a point missed above.
But What About the Phase?
If you are a researcher, you would have immediately spotted something we missed in Eq (\ref{equation-fmcw-chirp-mixing-output}). The phase also contains some range information that could have been exploited to improve the estimate.
\[
\phi = \pi \mu \tau_0^2 ~-~ 2\pi f\tau_0
\]
While we only use beat frequency $f_b$ for the range, we see in Part 2 how this phase information is stitched together to find the velocity of a moving target.
Finding the Beat Frequency $f_b$
To find the beat frequency $f_b$ that completely determines the range from the Eq (\ref{equation-fmcw-single-target-range}) above, we need to discard the frequency vs time plot and refer to the actual waveform.
In reality, the delayed echo is mixed with a downchirp to generate the output, see Eq (\ref{equation-fmcw-chirp-mixing-output}) above.
\[
y(t) = e^{j(2\pi f_b t +\phi)}
\]
This waveform is nothing but a simple complex sinusoid! That is a CW with frequency $f_b$, the real part of which is plotted in the figure below along with its spectrum.

Why does the spectrum have a sinc shape? While DSP folks can look into the mathematical derivation for the spectrum of a sinusoid, the intuitive reasoning is as follows.
- An infinitely long complex sinusoid with frequency $f_b$ in time domain has a spectrum that is an impulse at $f_b$.
- A rectangular signal in time domain is a sinc signal at DC in frequency domain.
- A limited duration waveform, like the sinusoid above, is similar to an infinite waveform multiplied with a rectangular signal.
- Multiplication in time domain is convolution in frequency domain.
- Convolution of the impulse at $f_b$ and the sinc signal at DC just puts the sinc signal at frequency $f_b$, as shown in the spectrum above.
The problem is now reduced to finding the frequency of a sinusoid in noise. There are several techniques available to accurately estimate the frequency of a sinusoid in noise, see Chapter 6 of Wireless Communications from the Ground Up for a few examples.
Once $f_b$ is known, it can be plugged in Eq (\ref{equation-fmcw-single-target-range}) to determine the range. And this frequency is not limited within a $2\pi$ span like the phase!
A word of caution: It is easy to overlook the phase part in such calculations but it must be included for proper analysis, particularly in joint communications and sensing applications.
Range FFT
Imagine what happens when there are multiple targets present in the environment. For example, an autonomous vehicle has to determine its distances from all things around, as well as velocities of the moving objects. This includes other vehicles, buildings, lamp posts, pedestrians, and the likes.

Let us consider the case of stationary targets first. Moving targets will be described in Part 2.
Cumulative Signal
In this scenario, instead of receiving a single echo, the radar receives multiple echos overlapped with each other to form the cumulative signal. One such example is drawn below for 3 targets. The echos are arriving after time delays $\tau_0$, $\tau_1$ and $\tau_2$ while the beat frequencies generated after mixing are denoted by $f_{bo}$, $f_{b1}$ and $f_{b2}$, respectively. The higher the delay, the larger the beat frequency.

It is easy to think from the bottom subfigure above that the cumulative signal is a sum of three constants and hence a constant signal. But remember that this is a frequency vs time plot. The actual signal is formed by the reflections from 3 targets that are essentially 3 chirps with different parameters. This cumulative signal is plotted in the figure below. After chirp demodulation, it is straightforward to see that the output signal is a sum of 3 sinusoids, similar to Eq(\ref{equation-fmcw-chirp-mixing-output}).

This mixer output or IF signal can be written as
\[
y(t) = e^{j(2\pi f_{bo}t+\phi_o)} + e^{j(2\pi f_{b1}t+\phi_1)} + e^{j(2\pi f_{b2}t+\phi_2)}
\]
Due to multiple reflecting echos, the algorithm searching for the frequency of a sinusoid in noise cannot be employed. Instead, what we can do is to locate the peaks in the spectrum of the return signal above a certain threshold. How do we compute the signal spectrum?
Finding the Beat Frequencies $f_b$
Even DSP beginners have heard about the Fast Fourier Transform (FFT) algorithm, known as the algorithm of the 20th century due to its huge impact on science and technology. An FFT is nothing but an efficient implementation of Discrete Fourier Transform (DFT) defined for a length-$N$ sequence as
\[
Y[k] = \sum_{n=0}^{N-1} y[n]e^{-j2\pi \frac{k}{N}n}
\]
The above mathematical expression can be described in a nutshell as follows.
- Remember that frequency is defined as the rate of change of phase (sample-by-sample here).
- If $y[n]$ contains a component of frequency $+k/N$, sample-by-sample de-rotation by a complex sinusoid of the same frequency but opposite direction (i.e., $−k/N$) results in an output as a single number due to the corresponding phase canceling out at each step.
- That single number is naturally the amplitude of the complex sinusoid with frequency $k/N$, an indicator of how much that sinusoid contributes to the construction of $y[n]$.
The cumulative signal and the FFT output for reflections from 3 targets after the mixer is plotted below.

The whole FFT process eventually tries to find the participation of every such complex sinusoid in construction of the examined signal. And finding the contribution from sinusoids of different frequencies above a certain threshold is exactly what we want, see the figure above.
This gives us the beat frequencies of all three echos, and hence the target ranges by extension, see Eq (\ref{equation-fmcw-single-target-range}).
The whole ranging procedure can now be summarized in one figure as shown below. The frequency domain is indicated by a range axis due their interchangeability.

The reason FFT vectors are stacked in a vertical column instead of a horizontal sequence will become clear in Part 2 when we explore how an FMCW radar estimates the velocities of moving targets as well. Finally, a suitable window is applied to the IF signal samples before taking the FFT to minimize the DFT leakage.
Conclusion
In conclusion, an FMCW radar is one of the most beautiful examples of a real DSP application. As Fred Harris says: "When faced with an unsolvable problem, change it into one you can solve, and solve that one instead." There are two ways in which this principle can be applied here.
1. Measure the Frequency, Not the Time
While measuring the time delays on the order of a few nanoseconds is difficult, estimating the range of an object through beat frequency becomes a straightforward task. This beat frequency $f_b$ arises from a cross term during the mixing process between Tx and Rx chirps because $\mu \tau_0$ is the change in frequency per unit time multiplied with time, and hence similar to Doppler frequency.
In a real scenario, there are multiple objects in the surroundings and the reflected echos prove even more troublesome by overlapping with each other at the Rx. Instead, taking an FFT of the mixer output easily reveals their ranges through detection of peak frequencies.
2. Move the Signal if the Target Does Not
Looking back, a CW radar cannot measure the range of a stationary object but can estimate the velocity of a moving target. An intelligent person should flip this idea on its head. We can move the frequency by introducing a chirp (i.e., a linearly changing frequency) which — upon reflection — reveals the range of a stationary target!
It can be applied to our personal and professional interactions too. Rather than expecting the world to behave in a certain way, it is often easier to change something on our part that ultimately achieves the same objective.
Finally, you can see the easiest tutorial on Kalman filter if you are interested in target tracking in radar systems.

As Usual EXCELLENT…GOD BLESS YOU
Very clear. Easy to read. Excellent.
Excellent
Hi, I’m learning FMCW Radar Part-1 and while going through the topic I got a doubt in “obstacles from an RF circuit design perspective in generation and processing of a high-power short duration signal”. Could you please explain why short duration signal generation is complex, this answer will help for my better understanding.
Pulsed radars require high peak power to achieve a good enough average output power (for an acceptable probability of detection) and such a large differential is not suitable for solid state devices.
Thanks Qasim!
Great explanation!
I have a question. In the section ‘CW, Complex Sinusoid and IQ Processing’, when deriving $y(t)$, why is the Rx signal multiplied by the complex conjugate of the Tx signal, rather than directly multiplying by the Tx signal? What does the mixer do with complex-form signals?
At the Tx side, the baseband signal is upconverted to a carrier frequency $f_c$ through multiplication process. If multiplication with a similar signal is carried out at the Rx side, then we will have a double frequency signal (which shouldn’t be there in complex signal processing, it is there for real sinusoids that is lowpass filtered).
\[
y(t) = e^{j[2\pi f (t-\tau_0)+\theta]}\cdot e^{+j(2\pi f t+\theta)} = e^{j(2\pi\cdot 2ft+2\theta-2\pi f \tau_0)}
\]
So the carrier frequency term becomes double. Instead, if we have a conjugate sinusoid at the Rx side (with a negative phase), then this phase will cancel the positive phase of the incoming sinusoid at each time step and we will be left with only the difference term. This difference term $e^{-j2\pi f \tau_0}$ was shown in the article and that’s what contains the range information.
Thanks Qasim!
Excellent job. Could you post some practical on FMCW signal processing step by step? I would be great to understand it in practical. Thanks
For a step-by-step implementation, start with the section FMCW Waveform. Generate the waveform through
\[
x(t) = e^{j(\pi \mu t^2 + 2\pi f t+\theta)},
\]
where the parameters such as chirp rate, sample time and other waveform parameters are designed after understanding the FMCW Radar Design Guidelines.
In the Finding the Beat Frequencies section, you provide a graph of the signal spectrum from three targets. It is clear how each beat frequency diverges to the right and left in the spectrum with a smaller amplitude. But what happens if there are several targets with different reflectivity, for example, a person and a large car. The signal from the car is, say, 20 times larger in amplitude and diverging to the right and left in the spectrum, it simply overlaps the signal from the person. Is it possible to somehow recognize the signal from the person in this case?
Good question. That’s where FFT resolution comes in. As long as we have sufficient resolution, see FMCW Radar Part 3 for more details, we can distinguish between different targets. Moreover, a car and a person would be traveling at different speeds, so we will be able to differentiate between them through the 2nd FFT (the Doppler FFT) in forming the radar date cube, as explained in FMCW Radar Part 2.
Let’s assume the resolution is 3m (signal deviation 50MHz). A person moves at a distance of 36m, and a car at a distance of 48m. Due to the fact that the signal from the car is 10-20 times larger in amplitude, then this signal will also be at frequencies equivalent to a distance of 42m and 54m, but with a smaller amplitude, 36m and 60m with an even smaller amplitude and will ultimately be equivalent to the amplitude of a person at a distance of 36m. Is there any way to get rid of the spread of “harmonics” to neighboring frequencies?
You also consider FFT everywhere, yes, it is a great tool, but it is difficult to implement on a microcontroller. Theoretically, if I do not need to know the exact distance, as well as the exact speed (if I only need to know the presence of a moving object with an accuracy of +-3 m and a speed of 0.1-8 m / s), this can be implemented using digital filtering. But here I again encounter the problem of “harmonics” from objects with high reflectivity …
Google the relevant DSP literature and you will find many techniques. But the main factor will be your computational resources.
Yes, but so far I haven’t found anything better than your series of articles.
For range FFT, how can we convert from frequency axis to range axis?
Range FFT gives us a set of beat frequencies $f_b$. Then using Eq~(\ref{equation-fmcw-single-target-range}), we can plug in the system parameters like chirp time $T_C$ and bandwidth $B$ to get the set of ranges.
can you give detail link budget calculation for a range measurement
In triangular FMCW radar or sawtooth FMCW radar:
Case 1: Do we need to do IQ modulation and IQ demodulation, then do FFT on received IQ data to get phase information of received signal?
Or
Case 2: Only real signal modulation and real signal receiving and do FFT then get beat frequency (fb), fb is having real and imaginary in FFT output which can give u phase by atan(imaginary/real), is this phase information enough to find velocity?
I’m using case 2, and I want to find phase information for each chirp. To find velocity, is it possible to find velocity using case 2 hardware or should I change the architecture to IQ modulation and IQ demodulation or real signal modulation and IQ demodulation?
Both architectures are fine. IQ modulation and demodulation is not a necessity, it provides ease of implementation. See the article on IQ signals.
I use DDS to create a chirp. The frequency changes from 400 to 800 MHz. Sweep time is 1 ms. At the mixer output I get the difference frequency, but during 1 ms only a piece of the difference frequency sinusoid is drawn. And so from chirp to chirp. It is clear that such a signal is difficult to analyze and understand what frequency. What to do in such a situation?
Lots of things. The problem starts with a proper design. If it is a course assignment, the instructor has not chosen the radar parameters properly. See FMCW Radar Part 3 for converting real world requirements into chirp parameters.
Hey what application did you use to make this math animations, asking because i have to use something similar for my project
I use a combination of Python, Matlab and Visio (for block diagrams). Hope that helps.
Great Explanation, thank You very much Mr. Qasim Chaudhari.
in equation 8
expj(-2pifbt+phi)
in stead of expj(2pifbt + phi)
Thanks for pointing that out. In the next line, I mention that negative sign is removed as it is immaterial with respect to distance.
Hi
I have made a matlab code that’s able to simulate a single target using the I/Q demodulation where I form the z =I +jQ baseband signal. The signal is a bit noisy in itself but we can see that it’s centered around the expected range.
However, when I add 2 more targets to it the results I get is a summation of them all because I find the instantaneous phase of every sample that maybe works best with 1 target.
What suggestions would you make for finding the instantaneous phase of multiple targets with this my approach
thank you
Calculate your resolution, apply range-FFT and see the results.
Hi Qasim, thanks for the effort! These pages you prepared have been quite useful for my thesis work. I’d like to refer to it, is there any technical paper you wrote about these or should I refer to your book? Or this webpage?
Hi Dora,
Thanks for your kind words. You can refer to the article or the book containing this article (I would prefer the article if you can). Here is how you can do it.